Sponsored by: Sensata Technologies

You can also choose to use TommieBot, an AI search assistant developed by St. Thomas School of Engineering students and faculty.
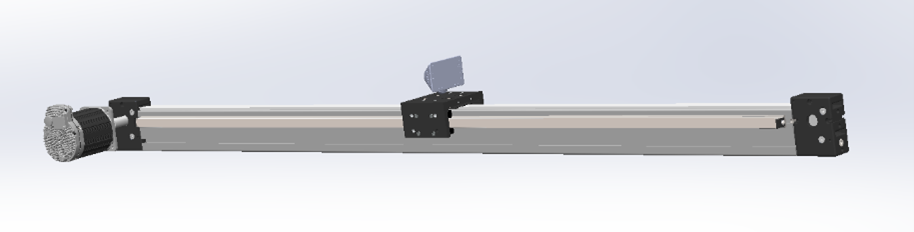
Take me to TommieBotSensata’s automotive dash-cameras automatically sense vibrations, harsh accelerations, and other common car conditions. This information is sent to the user by the dash camera for generating crash reports, receiving real time alerts, and other safety applications. Current camera testing involves human testers who can’t intentionally cause dangerous incidents that can produce high force data needed for camera validation. This makes testing not only unreliable but also inefficient and time-consuming. A new solution must be created to accurately and precisely test camera conditions to ensure product quality and testers’ safety.
Our design goal is to create a test rig that will consistently and safely test Sensata Technologies Owlcam Dash Camera.
Sponsored by: Sensata Technologies

Student Team:
Industry Representatives: JJustin Klassen, Nate Williams and Breon Nagy
Faculty Advisor: Surya Iyer
Pictured left to right: Renna Hintermeister, John Endris, Max Zimmerman, Vanesa Montes de oca Correa