Sponsored by: Nextern

You can also choose to use TommieBot, an AI search assistant developed by St. Thomas School of Engineering students and faculty.
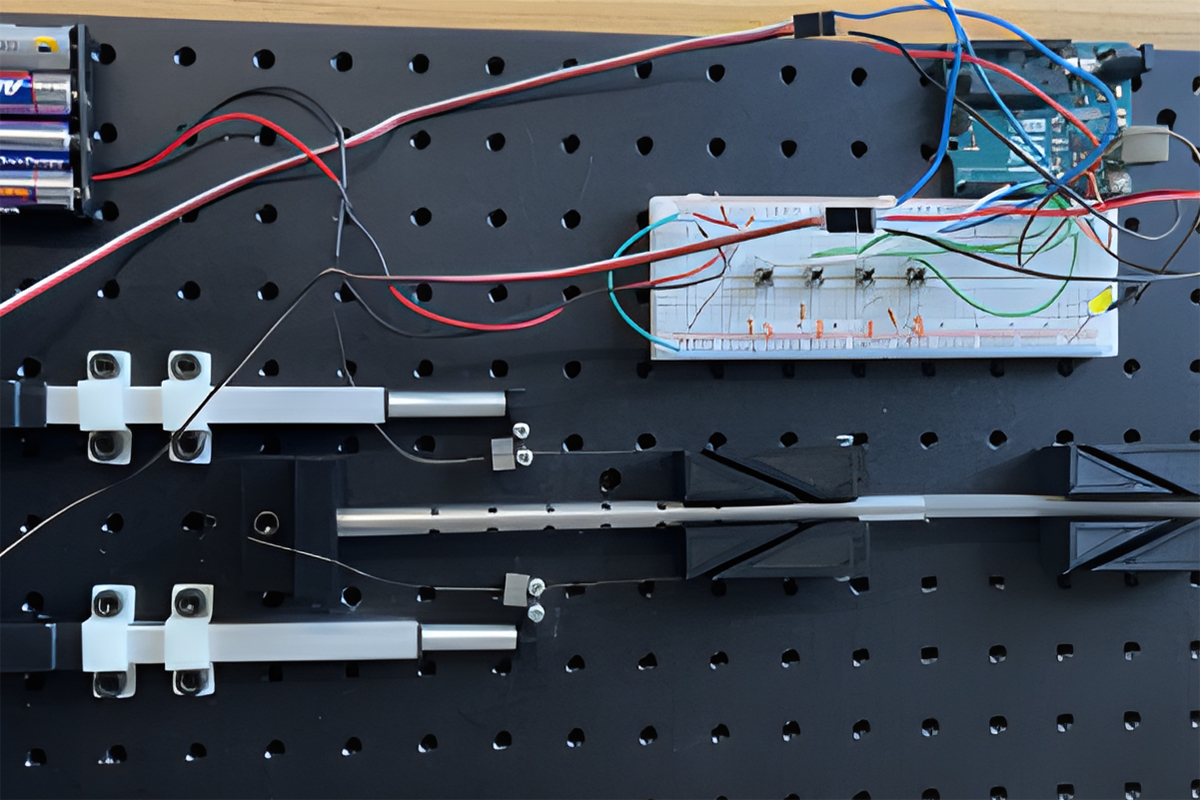
Take me to TommieBotPositional sensing is crucial for precise placement, navigation, and real-time feedback in catheter-based medical treatments. Utilizing Radwave’s customizable electromagnetic tracking platform, positional sensing was incorporated into an electro-mechanical system in which motors steer the distal end of the catheter.
This project aims to create a proof of concept for an electromechanical surgical catheter that helps not only the patients but also the surgeons. It aims to streamline the surgical procedure by reducing the surgeon’s effort to reposition the distal end of the catheter during the operation. This device also aims to reduce the time the surgeon spends in the operating room and allow full control of the catheter post insertion. As
for the patients, precise movements and locational tracking increases the success of the minimally invasive surgery.
Sponsored by: Nextern
Student Team:
Industry Representatives: Dagmawe Mamo
Faculty Advisor: Brad Reinboldt

Pictured left to right: Adam Eldredge, Gonzalo Cisneros Nieves, Amal Abdi, Kareem Ahmad